- Šta je električni motor?
- Dizajn elektromotora
- Princip rada
- Vrste električnih motora
- Opšte karakteristike motora
- Trenutak rotacije
- Snaga motora
- Efikasnost električnog motora
- Nominalni broj revolucija
- Trenutak inercije
- Dizajn voltage
- Konstanto električno vrijeme
- Osnovne formule za izračunavanje snage motora
- Zaključak
U elektromehanici postoji mnogo pogona koji rade sa stalnim opterećenjima bez promjene brzine rotacije. Koriste se u industrijskoj opremi i opremi za domaćinstvo kao što su ventilatori, kompresori i drugi. Ako su nominalne karakteristike nepoznate, tada se za proračune koristi formula snage električnog motora. Proračuni parametara posebno su relevantni za nove i malo poznate pogone. Proračun se vrši pomoću posebnih koeficijenata, kao i na osnovu akumuliranog iskustva sa takvim mehanizmima. Podaci su neophodni za pravilna operacija elektro instalacija.

Šta je električni motor?
Elektromotor je uređaj koji pretvara električnu energiju u mehaničku energiju. Rad većine jedinica zavisi od interakcije magnetnog polja sa namotajem rotora, koji se izražava u njegovoj rotaciji. Oni rade sa DC ili AC izvora energije. Baterija, inverter ili električna utičnica mogu djelovati kao element za napajanje. U nekim slučajevima motor radi obrnutim redoslijedom, odnosno pretvara mehaničku energiju u električnu energiju. Takve instalacije se široko koriste u elektranama koje rade iz protoka vazduha ili vode.

Elektromotori su klasifikovani prema vrsti izvora energije, unutrašnjem dizajnu, primeni i snazi. Takođe, AC pogoni mogu imati posebne četke. Rade iz jednofaznog, dvofaznog ili trofaznog napona, imaju hlađenje vazduha ili tečnosti. Formula snage AC motora
P = U x I,
gdje je P snaga, U je napon, I je amperaža.
Pogoni opće namjene sa svojim dimenzijama i karakteristikama koriste se u industriji. Najveći . Motori sa kapacitetom od više od 100 megavata koriste se u elektranama brodova, kompresorskih i pumpnih stanica. Manja veličina se koristi u kućanskim aparatima, kao što su usisivač ili ventilator.
Dizajn elektromotora
Pogon uključuje:
- Rotor.
- Stator.
- Korisni linkovi.
- Vazdušni razmak.
- Navijanje.
- Centrala.
Rotor je jedini pokretni deo pogona koji rotira oko svoje ose. Struja koja prolazi kroz provodnike stvara indukcijski poremećaj u namotaju. Formirano magnetno polje stupa u interakciju sa trajnim magnetima statora, koji pokreće osovinu. Izračunavaju se prema formuli snage struje električnog motora, za koju se uzimaju efikasnost i faktor snage, uključujući sve dinamičke karakteristike osovine.

Ležajevi se nalaze na osovini rotora i doprinose njegovoj rotaciji oko njegove ose. Spolja su pričvršćeni za kućište motora. Osovina prolazi kroz njih i izlazi. Budući da se teret proteže izvan radnog područja ležajeva, to se naziva nadvisivanje.
Stator je fiksni element elektromagnetnog kola motora. Može uključivati magnete za navijanje ili trajne magnete. Jezgro statora je napravljeno od tankih metalnih ploča, koje se nazivaju sidreni paket. Dizajniran je za smanjenje gubitaka energije, što se često dešava sa čvrstim šipkama.

Vazdušni razmak - rastojanje između rotora i statora. Mali interval je efikasan, jer utiče na nizak koeficijent rada električnog motora. Struja magnetizacije raste sa povećanjem veličine zazora. Stoga se uvijek trude da to učine minimalnim, ali do razumnih granica. Premalo rastojanje dovodi do trenja i slabljenja elemenata za pričvršćivanje.
Navijanje se sastoji od bakarne žice sastavljene u jedan kalem. Obično se postavlja oko mekog magnetiziranog jezgra koje se sastoji od nekoliko slojeva metala. Perturbacija indukcijskog polja događa se u trenutku prolaska struje kroz žice za navijanje. U ovom trenutku, instalacija prelazi u konfiguracijski način rada sa eksplicitnim i implicitnim polovima. U prvom slučaju, magnetno polje instalacije stvara se namotajem oko vrha stuba. U drugom slučaju, prorezi vrha stuba rotora su raspršeni u distribuiranom polju. Motor sa zaštićenim stubovima ima namotaj koji zadržava magnetne smetnje.
Prekidač se koristi za promjenu ulaznog voltage. Sastoji se od kontaktnih prstenova koji se nalaze na osovini i izolovani jedan od drugog. Struja armature se nanosi na četke kontakata rotacionog prekidača, što dovodi do promjene polariteta i uzrokuje rotor da se rotira od pola do pola. U odsustvu od napona, motor prestaje da se okreće. Savremene instalacije opremljene su dodatnim elektronskim sredstvima koja kontrolišu proces rotacije.

Princip rada
Prema Arhimedovom zakonu, struja u provodniku stvara magnetno polje u kojem djeluje sila F1. Ako je metalni okvir napravljen od ovog vodiča i postavljen u polje pod uglom od 90 °, tada će ivice doživjeti sile usmjerene u suprotnom smjeru jedna u odnosu na drugu. Oni stvaraju obrtni moment u odnosu na OS, koji počinje da ga rotira. Namotaji armature obezbeđuju konstantnu torziju. Polje je stvoreno električnim ili trajnim magnetima. Prva opcija je napravljena u obliku namotaja namotaja na čelično jezgro. Dakle, struja okvira stvara indukcijsko polje u namotaju elektromagneta, koje stvara elektromotornu silu.

Razmotrimo detaljnije rad asinhronih motora na primjeru instalacija sa faznim rotorom. Takve mašine rade iz naizmjenične struje sa frekvencijom rotacije armature koja nije jednaka pulsiranju magnetnog polja. Stoga se nazivaju i indukcija. Rotor se pokreće interakcijom električne struje u zavojnicama sa magnetnim poljem.
Kada nema napona u pomoćnom namotu, uređaj miruje. Čim se električna struja pojavi na kontaktima statora, u prostoru se formira trajno magnetno polje sa pulsiranjem + F I-F. Može se predstaviti kao sljedeća formula:
npr = nrr = f1 × 60 ÷ p = n1
gde:
npr - je broj obrtaja koje magnetno polje čini u pravcu napred, rpm;
nrr - da li je broj revolucija polja u suprotnom smjeru, rpm;
f1 - da li je frekvencija pulsacije struje električnog polja, Hz;
p-broj stubova;
n1 - ukupan broj revolucija u minuti.
Doživljavajući pulsacije magnetnog polja, rotor prima početni pokret. Zbog nehomogenosti uticaja protoka, on će razviti obrtni moment. Prema zakonu indukcije, elektromotorna sila se formira u kratko spojenom namotaju, koji stvara struju. Njegova frekvencija je proporcionalna klizanju rotora. Usled interakcije električne struje sa magnetnim poljem, stvara se obrtni moment osovine.
Za proračune performansi postoje tri formule za snagu asinhronog električnog motora. Prema faznom pomaku, oni koriste
S = P ÷ cos (Alfa), gdje:
S je ukupna snaga izmjerena u Volt-amperima.
P je aktivna snaga naznačena u vatima.
alfa-fazni pomak.
Puni kapacitet se shvata kao pravi indikator, a aktivni je izračunat.
Vrste električnih motora
Prema izvoru napajanja, pogoni su podijeljeni na one koji rade sa:
- DC.
- Prema.
princip rada , oni su pak podijeljeni na:
- Sakupljač.
- Valve.
- Asinhroni.
- Sinhrono.
Motori ventila nisu klasifikovani kao posebna klasa, jer je njihov uređaj varijacija kolektorskog pogona. Njihov dizajn uključuje elektronski pretvarač i senzor položaja rotora. Obično su integrisani zajedno sa kontrolnom tablom. Na njihov trošak postoji koordinirano prebacivanje armature.
Sinhroni i asinhroni motori rade isključivo od naizmjenične struje. Kontrola brzine se vrši uz pomoć sofisticirane elektronike. Asinhroni su podijeljeni na:
- Trofazna.
- Dvofazna.
- Jednofazna.
Teorijska formula za snagu trofaznog električnog motora kada je povezan sa zvijezdom ili trokutom
P = 3 * Uf * If * cos (alfa).
Međutim, za linearne vrijednosti napona i struje to izgleda kao
P = 1,73 × Uf × If × cos (alfa).
Ovo će biti pravi pokazatelj koliko snage motor uzima sa mreže.
Sinhroni su podijeljeni na:
- Postepeno.
- Hibrid.
- Induktor.
- Histereza.
- Reaktivno.
U svom dizajnu stepper motori imaju trajne magnete, tako da nisu klasifikovani kao posebna kategorija. Rad mehanizama kontroliše se pretvaračima frekvencija. Postoje i univerzalni motori koji rade od jednosmjerne i naizmjenične struje.
Opšte karakteristike motora
Svi motori imaju zajedničke parametre koji se koriste u formuli za određivanje snage električnog motora. Na osnovu njih možete izračunati svojstva mašine. U različitoj literaturi mogu se zvati drugačije, ali oni znače istu stvar. Lista takvih parametara uključuje:
- Torque.
- Snaga motora.
- Faktor efikasnosti.
- Nominalni broj revolucija.
- Moment inercije rotora.
- Dizajn voltage.
- Konstanto električno vrijeme.
Navedeni parametri su neophodni, prije svega, za određivanje efikasnosti električnih instalacija koje rade usled mehaničke sile motora. Izračunate vrijednosti daju samo približnu predstavu o stvarnim karakteristikama proizvoda. Međutim, ovi se pokazatelji često koriste u Formuli snage električnog motora. Ona je ta koja određuje efikasnost mašina.
Trenutak rotacije
Ovaj izraz ima nekoliko sinonima: trenutak sile, trenutak motora, obrtni moment, obrtni moment. Svi se koriste za označavanje jednog pokazatelja, iako sa stanovišta fizike ovi koncepti nisu uvijek identični.

U cilju objedinjavanja terminologije razvijeni su standardi koji sve dovode u jedinstven sistem. Dakle, tehnička dokumentacija uvek koristi frazu "torque". To je vektorska fizička veličina koja je jednaka umnošku vektorskih vrijednosti sile i radijusa. Vektor radijusa se povlači od ose rotacije do tačke primenjene sile. Sa stanovišta fizike, razlika između obrtnog momenta i obrtnog momenta leži u tački primene sile. U prvom slučaju to je unutrašnji napor , u drugom-vanjski. Vrijednost se mjeri u Njutn metrima. Međutim, u Formuli snage električnog motora, obrtni moment se koristi kao glavna vrijednost.
Izračunato je kako
M = F × r, gdje:
M-moment, Nm;
F-primijenjena sila, H;
R-radijus, m.
Za izračunavanje nominalnog obrtnog momenta pogona pomoću formule
Mnom = 30Pnom ÷ pi × nnom, gde:
Pnom - Nazivna snaga električnog motora, W;
nnom - Nazivni broj revolucija, min-1.
U skladu s tim, formula nazivne snage električnog motora trebala bi izgledati ovako:
Ph = Mnom * pi*nom / 30.
Obično su sve karakteristike navedene u specifikaciji. Ali dešava se da moraš da radiš sa potpuno novim instalacijama, informacije o kojima je veoma teško pronaći. Za izračunavanje tehničkih parametara takvih uređaja uzimaju se podaci iz njihovih analoga. Također, uvijek su poznate samo nominalne karakteristike koje su date u specifikaciji. Realni podaci moraju se izračunati nezavisno.
Snaga motora
U opštem smislu, ovaj parametar je skalarna fizička veličina, koja se izražava u stopi potrošnje ili konverzije energije sistema. Pokazuje kakav će posao mehanizam izvesti u određenoj jedinici vremena. U elektrotehnici, karakteristika prikazuje korisnu mehaničku snagu na centralnoj osovini. Za označavanje indikatora upotrijebite slovo P ili W. Osnovna mjerna jedinica je vat. Opšta formula za izračunavanje snage električnog motora može se predstaviti kao:
P = da ÷ dt, gdje:
A-mehanički (koristan) posao (energija), J;
utrošeno vrijeme, sec.
Mehanički rad je također skalarna fizička veličina izražena djelovanjem sile na objekt, a ovisi o smjeru i kretanju ovog objekta. To je proizvod vektora sile na putanji:
da = f × ds, gdje:
s je pređena udaljenost, m.
Izražava udaljenost koju će tačka primijenjene sile savladati. Za rotacijske pokrete izražava se kao:
ds = r × d (teta), gdje:
teta je ugao rotacije, rad.
Dakle, može se izračunati ugaona frekvencija rotacije rotora:
omega = d (teta) ÷ dt.
Iz njega slijedi formula snage električnog motora na osovini: P = M × omega.
Efikasnost električnog motora
Efikasnost je karakteristika koja odražava efikasnost sistem za pretvaranje energije u mehanički. Izražava se odnosom korisne energije i potrošnje. Prema jedinstvenom sistemu mjernih jedinica, označen je kao "eta" i da li je bezdimenzionalna vrijednost izračunata u procentima. Formula efikasnosti električnog motora kroz snagu:
eta = P2 ÷ P1, gde:
P1 - električna (isporučena) snaga, W;
P2 - korisna (mehanička) snaga, W;
Takođe se može izraziti kao:
eta = A ÷ Q × 100%, gdje:
A-koristan posao, J.;
Q je utrošena energija, J.
Češće se koeficijent izračunava pomoću formule potrošnje električne energije motora, jer su ovi pokazatelji uvijek lakši za mjerenje.
Smanjenje efikasnosti električnog motora posljedica je:
- Električni gubici. To se događa kao rezultat zagrijavanja provodnika od prolaska struje kroz njih.
- Magnetni gubici. Zbog prekomjerne magnetizacije jezgre pojavljuju se histereza i vrtložne struje, što je važno uzeti u obzir u Formuli snage električnog motora.
- Mehanički gubici. Povezani su sa trenjem i ventilacijom.
- Dodatni gubici. Pojavljuju se zbog harmonika magnetnog polja, jer stator i rotor imaju nazubljeni oblik. Takođe u namotaju postoje veći harmonici magnetomotivne sile.
Treba napomenuti da je efikasnost jedna od najvažnijih komponenti formule za izračunavanje snage električnog motora, jer vam omogućava da dobijete brojke najbliže stvarnosti. U prosjeku, ovaj indikator varira od 10% do 99%. Ovisi o dizajnu mehanizma.
Nominalni broj revolucija
Drugi ključni pokazatelj elektromehaničkih karakteristika motora je brzina rotacije osovine. Izražava se u broju revolucija u minuti. Često se koristi u Formuli snage motora pumpe kako bi se saznale njegove performanse. Ali mora se zapamtiti da je indikator uvek različit za rad i rad pod opterećenjem. Indikator predstavlja fizičku količinu jednaku broju punih revolucija za određeni vremenski period.
, formula za izračunavanje brzine:
n = 30 × omega ÷ pi, gdje:
N-brzina motora, rpm.
Da bi se pronašla snaga elektromotora prema formuli brzine osovine, potrebno ju je dovesti do izračunavanja ugaone brzine. Stoga će P = M × omega izgledati ovako:
P = M × (2pi × n ÷ 60) = M × (n ÷ 9,55), gdje
t = 60 sekundi.
Trenutak inercije
Ovaj indikator je skalarna fizička veličina koja odražava mjeru inercije rotacionog kretanja oko svoje ose. U ovom slučaju, masa tijela je vrijednost njegove inercije tokom translacijskog kretanja. Glavna karakteristika parametra izražava se raspodjelom tjelesnih masa, koja je jednaka zbiru proizvoda kvadrata udaljenosti od osi do osnovne tačke masom objekta.U međunarodnom sistemu jedinica označava se kao kg·m2 i izračunava se po formuli:
J = ∑ r2 × dm, gde
J je trenutak inercije, kg * m2 ;
m je masa objekta, kg.
Momenti inercije i sila povezani su odnosom:
M-J × epsilon, gdje
epsilon je ugaono ubrzanje, sa-2.
Indikator se izračunava kao:
epsilon = d (omega) × dt.
Dakle, znajući masu i radijus rotora, moguće je izračunati parametre performansi mehanizama. Formula snage električnog motora uključuje sve ove karakteristike.
Dizajn voltage
Naziva se i nominalnim. To je osnovni napon predstavljen standardnim skupom napona, koji je određen stepenom izolacije električne opreme i mreže. U stvari, može se razlikovati na različitim tačkama opreme, ali ne bi trebalo da prelazi maksimalno dozvoljenih normi načini rada dizajnirani za dugoročni rad mehanizama.
Za konvencionalne instalacije, Nazivni napon se podrazumijeva kao izračunate vrijednosti za koje ih daje programer u normalnom radu. Spisak standardnog mrežnog napona dat je u GOST-u. Ovi parametri uvijek su opisani u tehničke karakteristike mehanizama. Za izračunavanje performansi koristi se formula struje električnog motora:
P = U × I.
Konstanto električno vrijeme
Predstavlja vrijeme, potrebno za dostignite trenutni nivo do 63% nakon primjene napona na namotaje pogona. Parametar je uzrokovan prolaznim elektromehaničkim karakteristikama, jer su oni prolazni zbog velikog aktivnog otpora. Opća formula za izračunavanje vremenske konstante je:
te = L ÷ R.
Međutim, elektromehanička vremenska konstanta tm je uvek veći od elektromagnetnog te. Prvi parametar se dobija iz jednačine dinamičkih karakteristika motora pod uslovom da rotor ubrzava nultom brzinom do maksimalne brzine mirovanja. U ovom slučaju , jednačina ima oblik
M = Mst + J × (d (omega) ÷ dt), gdje
Mst = 0.
Odavde dobijamo formulu:
M = J × (d (omega) ÷ dt).
Zapravo, elektromehanička vremenska konstanta se izračunava po početnom momentu-Mn. Mehanizam koji radi u idealnim uslovima sa pravolinijskim karakteristikama imaće formulu:
M = Mn × (1-omega ÷ omega0), gde
omega0 - da li je brzina mirovanja.
Takvi se proračuni koriste u Formuli snage motora pumpe, kada hod klipa direktno ovisi o brzini osovine.
Osnovne formule za izračunavanje snage motora
Da biste izračunali stvarne karakteristike mehanizama, uvek morate uzeti u obzir mnoge parametre. . Kao prvo moraš znati, koja struja se dovodi u namotaje električnog motora: direktna ili naizmjenična. Princip njihovog rada je drugačiji, pa je i metoda izračunavanja drugačija. Ako izgleda pojednostavljeni oblik izračunavanja snage pogona:
Pel = U × i, gde
Ja sam trenutna snaga, A;
U-napon, V;
P - - snabdevena električna snaga. W.
Fazni pomak (Alfa) se također mora uzeti u obzir u Formuli snage AC motora. Shodno tome, , kalkulacije za asinhroni pogon Izgleda kao:
Pel = U × i × cos (alfa).
Pored aktivne (isporučene) snage, postoji i:
- S-reaktivni, VA. S = P ÷ cos(alfa).
- Q-puni, VA. Q = i × u × sin (alfa).
Proračuni također trebaju uzeti u obzir termičke i indukcijske gubitke, kao i trenje. Stoga izgleda pojednostavljeni model formule za DC motor:
Pel = Pmech + Rtep + Rind + Rtr, gde
Rmex-korisna generisana snaga, W;
Rtep-gubici proizvodnje toplote, W;
Kora - cijena punjenja u indukcijskom zavojnici, W;
Rt-gubici trenja, W.
Zaključak
Elektromotori se koriste u gotovo svim oblastima ljudskog života: u svakodnevnom životu, u proizvodnji. Za pravilno korištenje pogona potrebno je znati ne samo njegove nominalne karakteristike, već i stvarne. To će povećati njegovu efikasnost i smanjiti troškove.
 Šav za zavarivanje: oznaka, pravila i vrste
Šav za zavarivanje: oznaka, pravila i vrste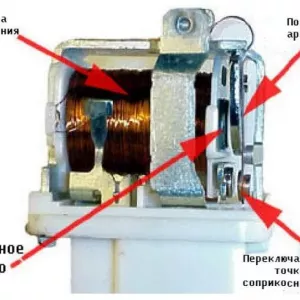 Dajte: vrste, klasifikacija, svrha i princip rada
Dajte: vrste, klasifikacija, svrha i princip rada Pištolj za omamljivanje protiv pasa: izbor modela, tehničke karakteristike, snaga pražnjenja, pravila upotrebe
Pištolj za omamljivanje protiv pasa: izbor modela, tehničke karakteristike, snaga pražnjenja, pravila upotrebe Znakovi osnovnih sredstava: pojam, vrste, klasifikacija
Znakovi osnovnih sredstava: pojam, vrste, klasifikacija Dac circuit. Digitalni-analogni pretvarači: vrste, klasifikacija, princip rada, namjena
Dac circuit. Digitalni-analogni pretvarači: vrste, klasifikacija, princip rada, namjena Indikator jačine valute: definicija, vrste, primjena
Indikator jačine valute: definicija, vrste, primjena Nosivo tijelo: dizajn, vrste, klasifikacija i karakteristike
Nosivo tijelo: dizajn, vrste, klasifikacija i karakteristike Rekombinantni interferon: vrste, klasifikacija i mehanizam djelovanja
Rekombinantni interferon: vrste, klasifikacija i mehanizam djelovanja Modeli predstavljanja znanja: vrste, klasifikacija i načini primjene
Modeli predstavljanja znanja: vrste, klasifikacija i načini primjene