Sistemi vakuumskog pomeranja se široko koriste u raznim industrija i izgradnja. Uz pomoć takvih uređaja, tipične manipulacije s različitim materijalima provode se pouzdano i sigurno u okviru logistike i proizvodnih procesa. Za brzo i često kretanje na velikim visinama koristi se vakuumsko podizanje koje može imati različite karakteristike performansi i konstrukcijski dizajn.
Opšti princip rada lifta

Uređaj sadrži posebne vakuumske usisne čašice u dizajnu, zahvaljujući kojima je osigurano hvatanje ciljnog materijala. Zatim se objekt koji se drži pomjera duž navedene konture kretanja. Princip vakuumskog hvatanja obezbeđuje sila posebne pumpe sa generatorom koji obezbeđuje usisavanje usisne čašice. Grubo govoreći, pod djelovanjem pneumatske kompresije, površina usisne čašice i ciljni materijal čvrsto su povezani s određenim opterećenjem dovoljnim za obavljanje sljedećih manipulacija bez lomljenja. Neke modifikacije predviđaju prisustvo kuke u mehaničkom sistemu za hvatanje, što takođe omogućava paralelno zakačenje limenki, kanti, kutija i drugih predmeta sa tačkom ovjesa.
Vrste mehanizama za vakuumsko hvatanje

Budući da uslovi za izvođenje operacija hvatanja i kretanja mogu biti različiti, dizajn radnih mehanizama se također razlikuje. Govorimo o osnovi vakuumskog zahvata, koji je u direktnom kontaktu sa površinom objekta. Postoje sljedeće vrste:
- Jednostruka hvataljka je najjednostavnije rješenje male veličine koje je optimalno pogodno za servisiranje kutija, ormarića, ploča itd. .
- Okrugli hvatač je poseban mehanizam za rad sa grubim materijalima. Na primjer, vakuumski liftovi za metalne, kamene ploče i drvene proizvode koji su prošli grubu abrazivnu obradu opremljeni su takvim glavama.
- Dvostruko snimanje je sistem koji se koristi u radu sa objektima koji zahtevaju držanje u nekoliko tačaka. Konkretno, ako se planira premještanje kutija zalijepljenih, povezanih ili nepouzdano spojenih na drugi način po težini.
- Multifunkcionalni hvatač je najsloženiji dizajn mehanizma za zadržavanje, u kojem se pretpostavlja istovremeni rad četiri ili više zaključanih glava. Ovo je najbolji vakuumski lift za staklo i druge lomljive materijale, koji su predstavljeni u formatu velikih ploča. U ovom slučaju potrebno je zadržavanje na nekoliko tačaka opterećenja, što eliminiše rizike lomljenja i oštećenja proizvoda pod sopstvenom težinom.
Kranski mehanizmi u sistemu za podizanje

Snimanje ciljnog objekta samo je pola bitke. Zatim je potrebno njegovo direktno kretanje, za šta je odgovoran manipulatorski kran. Njegova konstrukcija je obično izrađena od čeličnih ili aluminijumskih (eloksiranih legura) greda i profila koji su projektovani za specifične uslove primene. Kran je baziran na nosivoj ili visećoj bazi. U prvom slučaju radi se o podnom vertikalnom stubu, koji je sigurno fiksiran i po potrebi osiguran armaturnim elementima. U slučaju zglobnog sistema, implementiran je dizajn plafonskog manipulatora šine. Vakum lift se kreće duž navedenih ruta unutar radnog područja na čvrstim nosačima ovjesa, na primjer, u obliku lančane dizalice. Sila za kretanje takvih transportnih kolica stvara jedinicu za napajanje sa sopstvenim snabdevanjem energijom.
Uređaj komunikacijskog crijeva
Generator, kran i vakuumske hvataljke povezani su elementom za podizanje. Direktno povezuje mobilnu dizalicu i uređaje sa usisnim čašama. Element za podizanje djeluje i kao nosivi dio i kao punopravni funkcionalni organ koji pruža snagu i koordinaciju kretanja radnog mehanizma. U vakuumskom podizaču crijeva predstavljen je u obliku opružnog balansera sa dugim ručkama, duž kojeg je predviđen direktan smjer hvataljki. Površine čaure za podizanje dodatno su zaštićene poklopcima koji sprečavaju mehanička, termička i hemijska oštećenja odgovornog komunikacionog kola.

Rad upravljačkog sistema
Procese hvatanja i kretanja u kompleksu operater kontroliše posebnim daljinskim upravljačem. Najjednostavniji moduli sa dugmetom omogućavaju vam da obavljate osnovne operacije pneumatskog sistema i opreme za kran, a u naprednijim verzijama mehanizmi podržavaju i pomoćne funkcije:
- Pneumatika za uštedu zraka.
- Okreni se.
- Dugoročno zadržavanje na mestu.
- Podešavanje brzine.
Automatski vakuumski podizač može raditi prema datom algoritmu u načinu cikličkog ponavljanja operacija bez direktnog učešća operatera. Pored toga, najnoviji sistemi koriste princip bežične komunikacije, što eliminiše potrebu za postavljanjem autobusa koji nose struju na kontrolnu tablu.
Osnovne karakteristike opreme

Među glavnim tehničkim i operativnim parametrima ove opreme mogu se izdvojiti sljedeće:
- Kapacitet opterećenja – od 35 do 350 kg.
- Ugao okretanja – od 90° do 180°.
- Radni napon za električni pogon - obično se koriste jednofazne mreže od 220 V.
- Visina podizanja obično je ograničena na nivo položaja gornje tačke dizalice i može dostići 2,5-3,5 m, ovisno o modelu.
- Brzina kretanja vakuumskog lifta-Maksimalna u prosjeku je 45-60 m / min., , ali u modernim modelima, kao što je već napomenuto, podržava se mogućnost podešavanja ovog parametra.
Karakteristike liftova baterija
Manje uobičajena verzija sistema za hvatanje i pomeranje vakuuma, koju karakteriše potpuna autonomija tokom toka rada. Prisustvo baterija u dizajnu eliminiše potrebu za isporukom električnih kablova od 12 V, što takođe određuje specifičnosti primene opreme. Takvi se modeli koriste kao mobilni viljuškari u građevinskoj industriji za premještanje različitih materijala sa ravnim površinama. Na primjer, vakuumsko podizanje ploča za oblaganje može se koristiti i ručno i mehanizirano. U uslovima potpune autonomije konstrukciju sa zarobljenim građevinskim materijalom nose dva radnika, a u uslovima mehanizacije isti zadatak obavlja i specijalna oprema sa pogonom. Razlika je samo u nivoima napajanja iz baterije – u složenom režimu ili djelomično (isporučuje se samo uređaj za snimanje).
Zaključak

Oprema za vakuumsko podizanje pokazuje primjer kombinacije proizvodnosti, funkcionalnosti i ekonomičnosti. U velikoj mjeri, ujedinjenje takvih kontradiktornih svojstava postalo je moguće zahvaljujući princip rada pneumatskog mehanizma za hvatanje, koji troši minimum energije, ali istovremeno efikasno obavlja svoj zadatak. Istovremeno, postoji i niz tehničkih i strukturnih poteškoća u organizaciji rada vakuumskog lifta kao stacionarne opreme u proizvodnji. Za postizanje pokazatelja visokih performansi potrebno je stvoriti odgovarajuću infrastrukturu sa pogonskim pogonom, strukturnom bazom manipulatora i pomoćnim upravljačkim jedinicama. Međutim, ovi nedostaci su prošlost kao tehnološki razvoj i opšta optimizacija vakuumsko-pneumatskih mehanizama.
 Dvostruko kvačilo: uređaj i princip rada
Dvostruko kvačilo: uređaj i princip rada Akumulator energije: princip rada, uređaj, funkcije
Akumulator energije: princip rada, uređaj, funkcije Regenerativni izmenjivači toplote: vrste, princip rada, obim primene
Regenerativni izmenjivači toplote: vrste, princip rada, obim primene Ac mašine: uređaj, princip rada, primjena
Ac mašine: uređaj, princip rada, primjena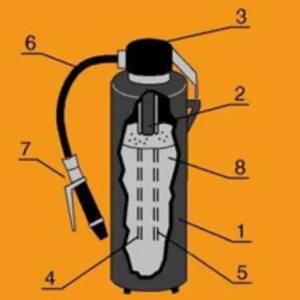 Aparat za gašenje požara prahom: princip rada, uređaj, namjena i karakteristike
Aparat za gašenje požara prahom: princip rada, uređaj, namjena i karakteristike Difuzijska pumpa: karakteristike, princip rada
Difuzijska pumpa: karakteristike, princip rada Bonpet uređaj za gašenje požara: upute, karakteristike i princip rada
Bonpet uređaj za gašenje požara: upute, karakteristike i princip rada Ekran osetljiv na dodir: princip rada, tehnologija i istorija pronalaska
Ekran osetljiv na dodir: princip rada, tehnologija i istorija pronalaska Kako funkcioniše dvr za automobil? Princip rada dvr-a
Kako funkcioniše dvr za automobil? Princip rada dvr-a